注:包括手动方式、自动方式、离线自动方式等。
在额定负
稳定
分类
磁导.
光学雷、
无线电車
激光导航 惯性导航 视觉导航
导航方式 navigation modg^ 自动导引车在运行区劑
装载方式
自动导引专畳必%的需求所提供的承载及货物交换方式。
--其他导航。
ICS 25.040.30
CCS J 28
GB/T 20721—2022
代替 GB/T 20721—2006
AUtOinatiC guided vehicles—General SPeCifiCatiOnS
2022-11-01 实施
2022-04-15 发布
中华人民共和国
国家标准
自动导引车通用技术条件
GB/T 20721—2022
*
中国标准出版社出版发行 北京市朝阳区和平里西街甲2号(100029) 北京市西城区三里河北街16号(100045)
总编室:(010)68533533 发行中心:(010)51780238
读者服务部:(010)68523946
中国标准出版社秦皇岛印刷厂印刷 各地新华书店经销
*
开本880X1230 1/16 印张2 字数53千字 2022年4月第一版2022年4月第一次印刷
*
书号:155066 • 1-70277 定价 46.00 元
如有印装差错由本社发行中心调换 版权专有侵权必究 举报电话 i(010)68510107
前言..................................................................*
2规范性引用文件.......................................................................................................
3术语和定义.............................................................................................................
6.7环境适应性要求..................................................................................g
7.1试验条件...........................................................................................................
7.2外观与结构试验..................................................................................................
7.3接口试验...........................................................................................................
7.4功能试验...........................................................................................................
7.5性能试验...........................................................................................................
7.6电源适应性试验..........................................................-.....................................17
7.7电磁兼容性试验..................................................................................................
7.8环境适应性试验..................................................................................................
7.9安全性试验.........................................................................................................
8检验规则.................................................................................................................
8.1检验分类...........................................................................................................
8 2型式检验...........................................................................................................
83出厂检验...........................................................................................................
9标志、包装、运输和贮存...............................................................................................
9∙1标志.................................................................................................................
I
GB/T 20721—2022 ...........................................................................21
9.2 包装...............................................................................................................
9∙3 运输...........................................................................................
9.4 贮存............ ..............................................................23
附录A (规范性)装载系统.......... ..................................................................
附录B (规范性)应用安全............... ..................................................................
附录C (规范性)地面条件和危险区域............:...............................................................
参考文献....................................................
本文件按照GB/T 1.1-2020«标准化工作导则 第1部分:标准化文件的结构和起草规则》的规定 起草。
本文件代替GB/T 20721—2006≪自动导引车 通用技术条件》,与GB/T 20721—2006相比,除结 构调整和编辑性改动外,主要技术变化如下:
a) 增加了术语和定义(见第3章)、产品分类(见第4章)、系统构成(见第5章);
b) 删除了“基本参数”(见2006年版的第3章);
C)增加了外观、结构、防护能力要求(见6.1);
d) 增加了电源接口、外部通信接口及其他接口要求(见6.2);
e) 更改了控制系统(见6.3.2,2006年版的4.2.4)、电源系统(见6.3.3,2006年版的4.2.5);
f) 增加了定位导航系统(见6.3.4)、驱动系统(见6.3.5).装载系统(见6.3.6)、安全防范系统(见
6.3.7) ʌ通信系统(见6.3.8)、人机交互系统(见6.3.9)及自动导引车管理系统要求(见6.3.10);
g) 增加了性能要求(见6.4);
h) 更改了环境适应性要求(见6.7,2006年版的4.1);
i) 增加了自动导引车电磁兼容性(见6.6)ʌ安全性(见6.8)、可靠性(见6.9)的要求和相对应的试 验方法(见第7章);
j) 更改了检验规则,增加型式检验和出厂检验的检验项目(见第8章,2006年版的第6章);
k) 更改了标志、包装、运输和贮存的要求(见第9章,2006年版的第7章);
l) 增加了规范性附录“装载系统”(见附录A)、“应用安全”(见附录B)和“地面条件和危险区域” (见附录C)。
请注意本文件的某些内容可能涉及专利。本文件的发布机构不承担识别专利的责任。
本文件由中国机械工业联合会提出。
本文件由全国机器人标准化技术委员会(SAC/TC 591)归口。
本文件起草单位:杭州海康机器人技术有限公司、沈阳新松机器人自动化股份有限公司、北京机械 工业自动化研究所有限公司、浙江大学、通标标准技术服务(上海)有限公司、杭州迦智科技有限公司、 云南昆船智能装备有限公司、华域视觉科技(上海)有限公司、广州市西克传感器有限公司、东杰智能科 技集团股份有限公司。
本文件主要起草人:贾永华、张雷、吴永海、白寒、杨书评、熊蓉、高峰、谢巍、高华、韩志雄、刘颖、孙逸超、 董海英、韩德昱、朱宏来、高磊、顾演浩、张驰。
本文件及其所代替文件的历次版本发布情况为:
——2006年首次发布为GB/T 20721—2006;
--本次为第一次修订。

1范围
本文件规定了自动导引车的产品分类、技术要求、试验方法、检验规则及标志、包装、运输、贮存。 本文件适用于仓储、产线、运输、制造业等领域的自动导引车的设计、制造、检验等。
2规范性引用文件
下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。其中,注日期的引用文 件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于 本文件。
GB/T 191包装储运图示标志
GB/T 2423.55电工电子产品环境试验 第2部分:试验方法 试验Eh:锤击试验
GB/T 4208外壳防护等级(IP代码)
GB/T 5226.1-2019机械电气安全机械电气设备第1部分:通用技术条件
GB/T 10827.1—2014工业车辆 安全要求和验证 第1部分:自行式工业车辆(除无人驾驶车 辆、伸缩臂式叉车和载运车)
GB/T 15706机械安全设计通则风险评估与风险减小
机械安全 电磁兼容 电磁兼容 电磁兼容 电磁兼容 电磁兼容 电磁兼容
电磁兼容 电磁兼容 电磁兼容
控制系统安全相关部件 第1部分:设计通则 试验和测量技术 试验和测量技术 试验和测量技术 试验和测量技术 试验和测量技术 试验和测量技术
试验和测量技术
GB/T 16855.1
静电放电抗扰度试验 射频电磁场辐射抗扰度试验 电快速瞬变脉冲群抗扰度试验 浪涌(冲击)抗扰度试验
射频场感应的传导骚扰抗扰度 工频磁场抗扰度试验
电压暂降、短时中断和电压变化的抗扰度试验
GB/T 17626.2
GB/T 17626.3
GB/T 17626.4
GB/T 17626.5
GB/T 17626.6
GB/T 17626.8
GB/T 17626.11
通用标准工业环境中的抗扰度试验 通用标准 工业环境中的发射
GB/T 17799.2
GB/T 17799.4
GB/T 18849机动工业车辆制动器性能和零件强度
GB/T 20138电器设备外壳对外界机械碰撞的防护等级(IK代码)
GB/T 26154—2010装配机器人通用技术条件
GB/T 27544—2011工业车辆电气要求
GB/T 27693工业车辆安全噪声辐射的测量方法 3术语和定义
GB/T 5226.1—2019界定的以及下列术语和定义适用于本文件。
3.1
自动导引车 automatic guided VehiCle ; AGV
具备物料运输或操作能力,以轮式移动为特征,基于环境标记物或外部引导信号,沿预设路线运 的自主移动设备。 ’E功 3.2
运行模式 running mode
单一自动导引车执行运动指令的方式。
3.3
3.4
3.5
3.6
4
4.1
注:包括手动方式、自动方式、离线自动方式等。
在额定负
稳定
分类
磁导.
光学雷、
无线电車
激光导航 惯性导航 视觉导航
导航方式 navigation modg^ 自动导引车在运行区劑
装载方式
自动导引专畳必%的需求所提供的承载及货物交换方式。
--其他导航。
4.2按驱动方式分类
按照轮式移动方式分类,包括:
—单轮驱动;
—双轮驱动;
--多轮驱动。
4.3按驱动结构分类
按照驱动结构分类,包括;
——差速结构;
——舵轮结构;
——麦克纳姆轮结构;
——履带结构;
——车桥结构。
4.4按装载方式分类
按照装载方式分类,包括:
一举升式;
—牵引式;
--背负式;
--移载式;
--叉取式;
——其他。
5系统构成
自动导引车由机械本体、控制系统、电源系统、定位导航系统 通信系统和人机交互系统构成,如图1所示。
、驱动系统、装载系统、安全防护系统、
注:机械本体是指承载结构。
自动导引车
机械本体
控制系统
电源系统
定位导航系统
装载系统
安全防护系统
通信系统
人机交互系统
图1自动导引车构成
6技术要求
6.1外观与结构要求
6.1.1外观要求
自动导引车外观应符合以下要求:
a)bc)d)e)D
表面没有明显的凹痕、划伤、裂缝、变形和污渍;
表面色泽均匀,不应有起泡、龟裂、脱落和磨损现象;
金属零部件没有锈蚀;
开关、操作键、指示灯、插座等有明确标志;
产品有标牌和商标;
涉及安全相关的有明确警示标识。
6.1.2结构要求
自动导引车结构应符合以下要求:
a) 按照制造商批准的设计图样和工艺文件进行制造;
b) 布局合理,装配方便,易于维修保养;
C)零部件配合可靠,内部走线整洁、固定可靠,接插件搭接良好可靠;
d) 所有紧固部分无松动,关键紧固部位做好划线标识,活动部分润滑和运转状况良好,减振可靠, 液压连接可靠;
e) 结构上的安全防护装置连接可靠,功能正常;
f) 具有足够的强度,静载承受1.25倍额定负载;
g) 没有造成危险的锐边或棱角;
h) 开关、按钮、手柄等装置的位置合理、操作方便。
6.1.3防护能力要求
6.1.3.1外壳防护等级
应符合GB/T 4208的要求。室内型电控部分防护等级应不低于IP3X,室外型电控部分防护等级 应不低于IP54o
6.1.3.2外壳抗损能力
非金属外壳应符合GB/T 20138中IK03要求。
6.1.3.3零部件
电气部件防护等级应满足GB/T 4208的要求。
6.2接口要求
6.2.1电源接口
电池组的输出接口应采用插接连接方式,不准许焊接或者导线搭接,其接口防护等级应不低 于 IP2X0
6.2.2外部通信接口
宜采用无线串口、光、以太网、蜂窝移动等通信接口。
6.2.3其他接口
宜具有若干个调试接口、无线或有线手动操作装置接口。
6.3功能要求
6.3.1机械本体
6.3.1.1自动导引车本体应保证在正常运行时产生的扭曲和变形足够小,避免发生功能故障。
6.3.1.2本体覆盖物应采用避免可能引发危险的形状,覆盖物应具有坚固的结构,以防止与其他物品发 生碰撞而产生功能故障。
6.3.2控制系统
6.3.2.1控制装置
控制装置应具有防振动功能,避免产生的振动对设备造成损害或出现功能故障。
操作面板应釆用易观察、易操作结构,避免操作人员产生误操作。
6.3.2.2运行模式
运行模式可具有自动方式、手动方式、离线自动方式等执行运动指令的方式,方式切换按照 GB/T 5226.1-2019的要求,应防止操作者意外触及导致方式切换。与安全相关的部分应至少满足 GB/T 16855.1中PLb的要求。运行模式主要包括以下几种方式。
a) 自动方式:在自动运行方式下,自动导引车应能接收系统的管理及指令分配,按照规划的路径 执行任务。
b) 手动方式:在手动控制方式下,自动导引车应能在符合要求的地面上运动;手动控制应使用制 造商提供的操作面板或专用手控装置(包括有线或无线),且无线手动控制装置应釆用工业级 产品;在该方式下不能对操作者产生风险,应按照GB/T 15706进行风险分析。
注:该方式适用于自动导引车的检修、调试以及紧急状态。
C)离线自动方式:在离线自动方式下,自动导引车以单机为运行单元,不受调度系统管理,在规定 的范围内,按规划的路径完成相应的任务。当自动导引车不接受调度系统管理时,在条件允许 情况下,宜接受调度系统的交通管制指令以确保运行安全。
将自动导引车的手动方式切换为自动方式时,应人工选择自动方式,再按下启动按钮,自动导引车 才能进入自动方式。当自动导引车在自动方式下运行时,如果将切换为手动方式,调度系统应确保对其 所在区域锁闭,避免手动操作中的人员或自动导引车与其他运行中的自动导引车发生碰撞。
6.3.2.3运动控制
应具有启动、停止、急停、复位(停止后恢复运行)等运动控制功能。
运动控制(包括速度控制、转向控制等)系统与安全相关的部分应至少满足GB/T 16855.1中PLC 的要求。如果通过障碍物检测装置来实现自动导引车安全停车时,运动控制系统与安全相关的部分应 至少满足GB/T 16855.1中PLd的要求。
6.3.2.4负载处理
负载搬运装置的设计应使得自动导引车在任何运行模式下,不应产生因负载移动导致的任何危险, 且负载系统应符合GB/T 10827.1—2014中5.3的要求。
注:包括在急停和负载转移情况下。
6.3.3 电源系统
6.3.3.1供电方式
供电方式可包括:
a) 电池供电;
b) 感应式供电;
C)线缆直接供电,
d)混合式供电。
6.3.3.2充电方式
充电方式可包括:
a) 自动充电;
b) 手动充电;
C)电池交换。
6.3.3.3 功能
电源系统宜具有如下功能:
a) 具备自动充电的功能;
b) 电量低于预设阈值时,自动导引车停止,提示充电并告警,仅手动操作才能恢复运转工作状态; C)为避免人员由于意外接触电池及其充电系统的充电连接而造成的危险,自动充电系统(不包E
防止人员接触的母线)设计成仅当自动导引车与充电系统连接时才能激活;
d) 在开放式交变磁场供电方式下,制造商向用户提供电源生成磁场的相关安全数据,确保不对环 境中的人员造成危害3
e) 制造商应根据用户需求选择合适的电池及充电设备,具体应符合以下要求: ——采用自动充电方式,在运行环境中保证一定的充电时间,可持续24 hɪ作; —一采用手动充电方式,电池每次充满电可保证至少一个工作班次的要求。
6.3.4定位导航系统
6.3.4.1导航方式
包括但不仅限于以下导航方式。
a) 电磁导航:在自动导引车的行驶路径上预埋金属线,并给金属线加载一定频率的电流,通过自 动导引车上的电磁感应线圈来感应金属线上的磁场的强弱,进行识别和跟踪。
b) 磁导航:在自动导引车的行驶路径上铺设或预埋磁带、磁钉,通过自动导引车上的磁导航传感 器,感应地面磁介质的磁场强度,进行识别和跟踪。
C)光学导航:自动导引车在运动过程中,通过自身携带的光学传感器,利用物理光学测量的方法, 获得导航装置和参考表面之间的相对运动的程度(速度和距离),进而确定相对位置和姿态信 息,如通过色带、线条进行导航等。
d) 无线电导航:利用无线电技术,接收端通过测量自身与若干个发射端的角度和距离等参数,获 取自身的相对位置和姿态信息,如卫星导航、地面无线电导航、超宽带导航等。
e) 激光导航:利用二维或三维激光扫描传感器,测量周边物体反射的光束,计算自身与周边物体 之间的角度和距离,从而获得自身的相对位置。激光导航包括有反光板方式和无反光板方式。
f) 惯性导航:利用惯性元件来测量自动导引车本身的加速度,经过积分和运算得到速度和位置。
g) 视觉导航:利用二维或三维视觉传感器,获得周边景物的图像或视频等信息,经过滤波、变换等 方法提取相应特征,从而获得自身相对位置。
h) 混合导航:以上a)〜g)两种及以上导航方式的混合使用。
6.3.4.2定位导航
自动导引车的定位导航中不同功能模块应符合以下要求。
a) 初始定位:根据不同的导航方式,自动导引车可在当前位置点自动/人工输入方式获取初始位 置信息,或是通过低速运行一段距离后自动/手动获取初始位置信息。
b) 自主定位:自动导引车可进行初始定位,在运行时应能实时定位,适时上报当前位置、方向等信 息至调度系统。
C)路径规划:自动导引车根据定位信息,应能进行轨迹规划和运动控制。
d)定位丢失恢复:在定位丢失的情况下,自动导引车在一定时间内能够自动/手动查找到当前的 位置信息,并恢复运行。
注:注意避免激光导航、无线电导航信息对称布置带来的定位风险。
6,3,5驱动系统
635.1移动部分
移动部分可由车轮/履带、制动器、驱动装置、传动装置、连接机构、悬挂装置、速度检测器(码盘等) 等构成。驱动部件与地面的接触材料应为耐磨材料。电机和减速器配合以保证在允许负载内的额定速 度。制动器应在急停和控制信号切断制动器电源以及系统断电时起作用。
6.3.5.2驱动方式
包括但不仅限于以下驱动方式:
a) 单轮驱动:使用单个轮子提供驱动力的方式;
b) 双轮驱动:使用两个轮子提供驱动力的方式;
C)多轮驱动:使用两个以上轮子提供驱动力的方式。
6.3.5.3 制动方式
制动应包括以下方式。
a) 紧急制动:指安全装置触发对自动导引车提供的紧急制动。紧急制动器应确保自动导引车本 体在与障碍物之间的撞击之前使其停止。
b) 停车制动:用于减慢或停止自动导引车的装置。当运行的自动导引车停止时,应有措施防止因 外力或地面不平造成的自动导引车移动。
C)驻车制动:系统断电或长期处于停止状态时制动,特别是当自动导引车停车在一定的坡度上, 应能稳定停止。
以上所有制动方式可共用一个制动器,也可采用多个制动器。
按照GB/T 15706进行风险评估,其制动系统应符合以下条件:
a) 在切断制动器电源供电时,自动导引车启动制动;
b) 考虑负载、速度、摩擦力、坡度和磨损等因素,障碍物出现在检测范围内,自动导引车停车;
C)在制造商规定的最大坡度上,通电或者断电均能够保持自动导引车处于最大允许负载状态时, 不发生移动;
d) 在失去速度控制或转向控制时,自动导引车启动制动;
e) 自动导引车的制动器应符合GB/T 18849的要求;
f) 自动导引车在运行中制动时,应能保持运动姿态且不失控。
6.3.6装载系统
装载系统应符合附录A的相关规定。
6.3.7安全防范系统
6.3.7.1障碍物检测
障碍物检测装置分为接触式和非接触式。关于自动导引车障碍物检测的应用安全应符合附录B 的相关规定。
自动导引车的障碍物检测装置应符合以下要求。
a)自动导引车应在主要运行方向上安装障碍物检测装置,且这些障碍物检测装置应符合以下 要求:
——自动导引车运行状态下,障碍物检测装置检测范围至少要涵盖车体自身及其负载的全部 宽度;
——如果使用非接触式障碍物检测装置,确保自动导引车在与人或其他障碍物接触之前停车;
——非接触式障碍物检测装置可具有减速区域和紧急停止区域,但是,当人或其他障碍物进入 减速区域时,采用控制系统控制减速或停车;当人或其他障碍物进入紧急停止区域时,采 用紧急停车I
—对于品接触式障碍物检测装置,根据现场应用的实际情况,可选择激光、红外、超声或其他
检测传感器,当速度大于0.3 m/s或负载超过200 kg时,控制系统与安全相关的部分应 至少符合GB/T 16855.1中PLC的要求;
一非接触式障碍物检测装置对应用环境中所有材料的物体均具有足够的检测范围; 接触式障碍物检测装置防止当自动导引车碰撞人或其他障碍物时产生伤害或故障,当自 动导引车与人或者其他障碍物发生碰撞时,碰撞条的最大触发力不应超过22 N;当发生 撞击时,如果允许自动恢复运行,则应在障碍物离开至少2 s后再恢复运行;
一非接触式障碍物检测传感器能监测行驶路径。同时,在自动导引车启动之前检测该区域, 以便在移动之前检测到进入行驶路径的人及物体;
—非接触式障碍物检测传感器的紧急停止区域有效感应距离大于自动导引车紧急停车所需 的距离。
其他障碍物检测装
PLC的要求。
运行模式
关闭。
)应至少符合GB/T 16855.1中
b)
C)
d)
f)
6.3.7.2
6.3.7.3 声
b)
C)
弯的侧
停
应具备急中
9的
—2
?急
引
置廈安装在便予
载
物检测
太短),贝
况下,抑制
f动作时,提前发出殖
),
168
(如
物
。类或
的
动
告警系统,以提醒自动导引车周围的人及时发
与安全相
动方
当自动得引 导弓
范蜀内
何情况下以任何方式
求。
复后应经人
;转弯动作结束后,关闭告警。
离线自动方式情况下,障碍物检
能符合a)的要求(如装有叉臂的自动导引车,接i
困人员无法逃离时,该方向上的最大速度应限制在0∙3
和存放站的自动 对应侧600 mm LC的要求。
I车侧面防撞
自亏
急停
急停装置月
工确认复位L急蔭装置
自动导引车 自动导引车声 a)障碍物检
在搜近的自动导引车。
警系崎应符合GB/T 5226.1—2019的要求,
车检测到远距离减速区
能。
寸,声光告警提示;当障碍
物消失时,告警取 转向告警:自动导引车
d)
e)
f)
启动告警:在自动导引车从休眠宜 远程重新启动之前,应启动声光告警,表示自动
导引车即将在自动控制下运动。告警光应在自动导引车运行趋近的方向上易于看到。 运行告警:在所有自动导引车运动过程中,应开启声光提示,且不能被手动关闭。
变向告警:在倒车或行驶方向改变时,运动中的自动导引车应提供与d)不同的警告声光指示。
故障告警:当出现故障时,应提供声光告警以提醒人员,包括以下情况:
—路径参考丢失或偏离预定的轨迹;
--失去速度控制;
——需要合格操作员干预的其他控制系统故障。
g)电量告警:当电池电量不足时自动导引车应有声光告警(包括在非自动运行状态下)。
6.3.7.4失速保护
自动导引车的运行速度超出可控范围即为失速状态,处于失速状态的自动导引车应自动停止运行,
发出警报信息,等待人工介入处理。
6.3.7.5通侑中断保护
当自动导引车与通信网络系统中断通信超过一定时间时,自动导引车应自动停止运行,发出警报信 息,如在一定时间内通信中断恢复,自动导引车应自行恢复运行。
注i通信中断的时间由制造商自行设定。
6.3.7.6导航丢失保护
导航丢失保护包括导航误差超限保护和地标丢失保护。
导航误差超限保护指自动导引车在自动运行状态下,车体位置及姿态超出实际规划监测的最大位 置偏差值时的保护机制,最大位置偏差值由制造厂商根据应用环境情况设定。
地标丢失保护指在具有地标属性的导航方式中,自动导引车在经过的路段内,没有检测到地标信息 的保护机制。偏差值由制造厂商根据应用环境情况设定。
当自动导引车在运行过程中出现导航丢失保护时,自动导引车应立即停止运行,发出告警信息,等 待人工介入处理。
6.3.7.7保护电路与系统安全分析
保护电路与系统安全分析应符合:
a) 在自动导引车的系统设计时,要对因控制部件故障或程序故障而产生的潜在危险进行分析,适 当增加保护电路,以验证与设计相关的所有潜在危险;
b) 自动导引车急停时的反向电动势及反向电流不会对其本身产生影响;
C)对于电池管理系统,保护电路将电池保持在其正常工作电压阙值范围内进行充电,如果超过正 常限值,保护电路将限制或关闭充电或放电,以防止意外发生。
6.3.8通信系统
通信系统可选用定点光通信,工业级WiFi或者蜂窝式移动通信网络。
6.3.9人机交互系统
6.3.9.1液晶触摸屏交互
至少满足以下要求:
a) 显示调度系统任务状态;
b) 显示自动导引车运行状态;
C)显示自动导引车安全状态、传感器状态;
d) 显示故障信息;
e) 设备简单控制。
6.3.9.2指示灯交互
指示灯颜色和状态宜按照GB/T 5226.1—2019的要求进行选择。
6.3.10自动导引车管理系统
6.3.10.1远程升级
自动导引车宜具有远程升级固件程序,包括嵌入式级程序。
6.3.10.2异常告警
自动导引车处于异常状态时,应自动向调度系统上报告警信息,并在本机显示屏上显示告警信息。
6.4性能要求
6.4.1额定负载
应符合制造商声明的数值,在额定负载的情况下,自动导引车能够正常运行。
6.4.2 柘*≠ι沽存
应
6.4.3
应
6.4.4
物
自动
应,
6.4.5 噪,
自日
注:
充电 自动
6.6 电磁兼墅、/ t
应根据制溢聲聶聲品特点,选择GB/T 17799.2,GB/T 17799.4岁布岁匕
6.7环境适应性
6.7.1 地面环境适应
Il劫口弓IT士在 W''Ff⅞lr∏ Il i二行 一—
a) 平面度:自动导引车运行应能通过平面度在1 m2范围内不小于3 mm的路面,自动导引车应 能实现可控的额定速度行驶。
b) 路面坡度:自动导引车运行应能通过坡度不小于0.05的路面,自动导引车应能实现可控的额 定速度行驶。自动导引车应能在路面坡度不小于0.01停车点可靠停止。
C)台阶高度:自动导引车应能通过台阶高度不小于5 mm的路面,应能实现可控的额定速度 行驶。
d)沟槽宽度:自动导引车应能通过沟槽宽度不小于8 mm的路面,应能实现可控的额定速度 行驶。
6.7.2气候环境适应性要求
自动导引车在表1环境条件使用、运输和贮存时,应能保持正常。
表1环境气候适用性
|
环境条件 |
工作条件 |
_____运输和贮存条件_____ |
|
环境温度 |
5 C 〜40 ,C |
-10 C 〜50 ,C |
|
相对湿度 |
<90%,无结露 |
≤93¼(40 C) |
|
大气压力 |
86 kPa〜106 kPa | |
|
空气 |
___________无粉尘、易燃、易爆和腐蚀性气体___________ | |
|
静电 |
-r-⅜⅞甘料应釆用容易放电的物质_________ | |
|
其他要求 |
LL在有电磁波、散射光、齢IZL字等噪声的环境中,用户及 P1卩叽價皿自动导引车正常运行 | |
|
注:特殊环境自动眾痛,弟gj本种由制造商和用户商量确定. | ||
循环次数/次
扫频速率/(oct∕ min)
频率范围/Hz
自动导弓
应检査
「含)或
定频
持续时间*∕min
频率范围/H:
6.7.3机械环境膚应1⅛僂求
5〜55
5〜55
扫频耐久试验
最后振动响应检査b
振幅∕mm
已做过扫频耐久试验的样品可将最后一次扫频试验作为最后振动响应检査。
*持续时间由制造商选择。
b已做过定频耐久试验的样品应做此项试验・
表3冲击要求
|
严酷等级 |
零部件 |
自动导引车 | |
|
峰值加速度 m∕s8 |
持续时间 ms | ||
|
150 |
11 |
— |
由公路、铁路或空中运输的在牢固的抗冲击包 装中的自动导引车_____ |
|
300 |
18 |
—— |
在标准公路或铁路运输的自动导引车 |
|
冲击轴向与次数:六个方向各三次,可根据实际情况减少方向数,但是不能减少每个方向上次测试次数。采用其他 量值需要在报告中说明原因。 注1:样品不带电。 注2:冲击波形:半正弦波。 _ _ | |||
6.8安全性要求
6.8.1接地电阻
应符合GB/T 26154—2010中5.4.2的要求。
6.8.2绝缘电阻
在动力电路导线和保护联结电路间,绝缘电阻不应小于1 000 0乘以标称电压值。
6.8.3耐电强度
应符合GB/T 26154—2010中5.4.4的要求。
6.9可靠性要求
自动导引车的可靠性用平均无故障工作时间(MTBF)和平均修复时间(MTTR)来衡量,具体数值 可由制造商自行规定。
7试验方法
7.1试验条件
7.1.1试验环境要求
本文件中除特殊要求外,均在下述条件下进行:
a) 温度:5 ,C~40 'C;
b) 相对湿度:当最高温度40 C时,相对湿度不超过50%;允许温度降低时,允许更高的相对湿度
(如20C时相对湿度为90%);
C) 大气压力;86 kPa~106 kPa.
7.1,2试验样品要求
自动导引车符合以下条件:
a) 自动导引车系统应按制造商规定的要求组装好,所需的设备安装、调试完毕,试验应在携带典 型任务设备与最大负载状态进行;
b) 自动导引车应装备齐全,并按制造商规定充满电;
C)若自动导引车上安装测试仪器,应减少对自动导引车的影响。
7.1.3试验场地要求
试验场地应满足制造商规定的使用条件,若无要求,则应符合附录C中c.l地面条件。此外,动态 试验场地应满足以下要求:
a) 地面摩擦因数不大于制造商设计要求;
b) 试验场地的水平部分沿垂直于运行方向的横向坡度不大于2%,运行方向的纵向坡度不大于 ±0.5% i
C)试验场地的坡度部分要满足制造商设计的最大坡度;
d) J
7.2外观
目视;
用测量
7.2.3夕卜
7.2.3.1 夕 I
7.2.3.2 夕 I
按照GWT
7.3接口试
采用目视法
力试验
3.55 规
,查看是否符合6.2的要求。
采用目视法检查机械本潔
7.4.2.1控制装置
自动导引车通电并完成自检。根据制造商的规定,让自动导引车持续运行一定时间(或一个班次) 后,检查自动导引车的控制装置是否出现损害或功能障碍。
在自动导引车运行过程中,检查是否可以便捷地通过操作面板控制自动导引车的运行模式和运动。
7.422运动模式
设置自动导引车进入自动方式,让其接收调度系统的管理、指令,检査其是否按照指定的路线执行 任务。
设置自动导引车进入手动方式,让其脱离调度系统,检査其是否通过手控装置进行独立操作。
设置自动导引车进入离线自动方式,让其脱离调度系统,检查其是否通过无线网络接收单机控制客 户端的指令,并沿设定的路径执行固定的任务。
7.4.2.3运动控制
自动导引车通电并完成自检。检査自动导引车在自动/手动/离线自动模式下的行驶、停止、急停、 复位等运动控制是否正常。
7.4.2.4负载处理
自动导引车装载额定负载运行,在任何运行模式下,查看是否出现任何异常。
7.4.3电源系统
自动导引车的输入值,或者板外电源或充电器的输出值,不应超过制造商规定的额定值±ιo%以上。
检验方法如下:
a) 自主充电
自动导引车能自动检测电量,低于制造商声明的國值时能自动发送充电申请信号,由调度系统
控制自动完成充电;
b) 电量低自我保护
当自动导引车电量低于制造商声明的阈值时,查看自动导引车是否声光告警。
7.4.4定位导航系统
7.4.4.1电磁导航
在测试场地预埋金属线,并给金属线加载一定频率的电流,自动导引车能够识别地面电磁信号,并 沿金属线自动运行、停止。
在以下情况不能影响自动导引车的正常运行
—当磁场强度不低于预设值;
——导航金属线周边50 Cm范围外存在同频电磁场干扰。
测试前置条件:测试场地预埋5 m以上金属导线,并加载固定频率的电流,构建测试拓扑地图,包 括设备运行路线及起始点、终点,并且确保自动导引车初始定位正确。
测试过程:在地图上设置自动导引车运行目标点,采用自动导航模式运行,自动导引车能按指定的 路径准确运行到目标点。
7.4.4.2磁导航
在测试场地粘贴或预埋导航磁带和地标,自动导引车能够识别地面磁信号,并沿磁带自动运行、停 止及通过地标信息确定运行策略。在以下情况不能影响自动导引车的正常运行:
—当导航磁带连续损毁长度不超过50 Cm时;
—当磁场强度不低于预设值。
7.4.4.3光学导航
在测试场地粘贴色带或线条,自动导引车能够识别地面色带或线条,并沿色带或线条自动运行、停 止确定运行策略。
7.4.4.4无线电导航
测试前置条件:测试场地应具备可靠的无线电导航信号覆盖,并构建测试拓扑地图,包括设备运行 路线及点位,并且确保自动导引车初始定位正确。
测试过程:在地图上设置自动导引车运行目标点,采用自动导航模式运行,自动导引车能按指定的 路径准确运行到目标点。
7.4.4.5激光导航
测试前置条件:在测试场地构建拓扑地图,包括设置运行路线及点位,并且确保自动导引车初始定 位正确。
测试过程:在地图上设置自动导引车导航运行目标点,釆用自动导航模式运行,自动导引车能按指 定的路径准确运行到目标点。
7.4.4.6惯性导航
测试前置条件:在测试场地构建地图,以及在地图的基础上构建拓扑地图,包括设置运行路线及点 位,并且确保自动导引车初始定位正确。
测试过程:在地图上设置自动导引车导航运行目标点,采用自动导航模式运行,自动导引车能按指 定的路径准确运行到目标点。
7.4.4.7视觉导航
测试前置条件:在测试场地构建地图,布置二维码,包括设置运行路线及点位,并且确保自动导引车 初始定位正确。
测试过程:在地图上设置自动导引车导航运行目标点,采用自动导航模式运行,自动导引车能按指 定的路径准确运行到目标点。
7.4.5驱动系统
7.4.5.1移动部分
采用目视法检查,查看是否符合6.3.5.1的要求。
通过调度系统给装载额定负载的自动导引车发送移动指令,检查移动部分是否达到制造商声明的 额定速度,且运行平稳。
7.4.5.2驱动方式
采用目视法检查,查看是否符合6.3.5.2的要求。
7.4.5.3制动方式
使用机械制动器作为停止手段的自动导引车进行该实验。试验期间,基于室温(25 C)的环境温 度,制动器外表面的温度不高于175 -Co制动器不应着火或散发火焰或冒烟。
自动导引车配备有充足电电源,在其额定负载(如适用)时,以最大速度行驶在水平路线上操作。每 30 m通过刹车完全停止,测试进行1 h,或直至电源到达低电保护为止,两者以最先出现者为准。
7.4.6装载系统
调度系统通过网络向自动导引车发送装载系统的指令,检查装载系统是否能够在制造商声明的规 定时间内完成指令。
7.4.7安全防范系统
7.4.7.1障碍物检测
自动导引车满载,在足够远处加速至最高车速,保持最高车速驶向标准试件。
试验一:A试件(直径200 mm,长度600 mm)平放在自动导引车运动方向上,其受到的撞击力不大 于 750 Ne
试验二:B试件(直径70 mm,高度400 mm)垂直立在自动导引车轨迹上,撞击力不大于25。No
15
注h每个主运动方向上试验一和试验二进行两次实验,摆放位置分别在自动导引车运动方向上的最左侧和最右 侧。前进方向和后退方向各进行一次实验。
注2:其他的人员/障碍物检测装置只进行试验二。
注3:实验过程中确认移除试件之后,在一个明显的警示信号之后至少延迟2 S自动导引车才能启动.
7.4.7.2急停装置
自动导引车运行过程中,按下急停装置,检查自动导引车是否立即停止运行,释放急停装置,经人工 确认按下复位按钮,查看自动导引车是否恢复到急停前的状态。
7.4.7.3声光告警
障碍物检测告警声:在自动导引车运行过程中,在检测到远距离减速区有障碍物时,査看自动导引 车是否有告警声提示;当障碍物移开后,查看告警声是否消失。
转弯告警声:控制自动导引车进行转弯时,查看自动导引车是否发出告警声;转弯结束后,査看自动 导引车是否关闭告警声。
启动告警声:查看自动导引车从休眠或非运动状态启动前,是否有声光启动告警,其中光告警需要 在其即将运行方向侧易于持续辨识。
运行告警:査看自动导引车在其运行过程中是否具有声光告警,且该告警不能被手动关闭。
变向告警:当自动导引车需要倒车或者行驶方向改变时,检査运行中的自动导引车是否提供区别于 运行状态的声光告警。
故障告警:当岀现故障时,检查自动导引车是否有声光告警,查看该告警是否区别于正常运行时的 告警。
电量告警:当电池出现电量不足,检査是否具有明确的声光告警。
7.4.7.4失速保护
模拟失速,查看自动导引车是否停止。若不能够停止则进行性能限制实验确认性能是否超过限制 范围,故障期间要能进行手动操作。
7.4.7.5通信中断保护
模拟通信信号中断,查看自动导引车是否自动停止。
7.4.7.6导航丢失保护
模拟导航信号失效,查看自动导引车是否自动停止。若不能够停止则进行性能限制实验确认性能 是否超过限制范围,故障期间要能进行手动操作。
7.4.8通信系统
自动导引车已通过无线网络(工业级WiFi或者蜂窝式移动通信网络)向调度系统注册成功,通过 调度系统向自动导引车发布运行指令,查看是否执行相应的动作。
7.4.9人机交互功能
7.4.9.1液晶显示屏显示内容
按照制造商说明书的内容,检查显示屏显示的信息是否符合要求。
7.4.9.2指示灯交互
通过目视法查看指示灯颜色。
正常运行:显示绿色;
自动导引车处于异常状态:显示黄色;
自动导引车处于危险状态:显示红色。
7.4.10自动导引车管理系统
7.4.10.1远程升级
通过客户端登录自动导引车,对自动导引车进行远程升级,模拟掉电、断网等异常情况下,査看自动 导引车是否能正常升级到最新版本,升级失败能否正常启动。
7.4.10.2异常告警
按照说明书,触发自动导引车不同的告警状态,通过监控客户端查看自动导引车是否正确上传告警 信息,同时查看自动导引车液晶显示屏(如有)上是否正确显示告警信息(符合告警等级)。
7.5性能试验
7.5 J额定负载
自动导引车在额定负载下,在额定速度下连续运行30 min,测量后,再进行其余的性能试验,试验 后自动导引车的外观和性能不受到影响。
7.5.2额定速度
测试通过直线上速度稳定的那一点起20 m以上区间的时间,以测定的时间、距离为基础计算额定 速度。测试不少于30次,数据取平均。
在有额定负载、前进和后退(无后退功能情况除外)的情况下进行。公式见式(1):
V = — ..............................( 1 )
t
式中:
P——速度,单位为米每秒(m∕s);
I ——距离,单位为米(m);
t ——通过时间,单位为秒(s)。
7.5.3停车精度
在规定直线运动轨迹上,事先做好预停止的定位位置误差标记。当自动导引车以额定速度到正常 停止状态,停止后用量具测量自动导引车前后左右停止位置的情况。
7.5.4续航时间
电池电量充满时,以额定负载和额定速度连续运行,记录运行时间和里程。
7.5.5噪声
按照GB/T 27693的测试方法进行测试。
7.6电源适应性试验
在额定电压的一 10%〜+ 10%范围内,查看自动导引车是否正常运行15 mino
7∙7电磁兼容性试验
按照 GB/T 17626.2,GB∕T 17626.3、GB/T 17626.4xGB/T 17626.5>GB∕T 17626.6vGB∕T 17626.8、 GB/T 17626.11规定的对应项目进行试验。
7.8环境适应性试验
7.8.1地面环境适应性试验
自动导引车在以下地面上运行。
a)平面度
在1 m2范围内不小于3 mm的路面上,控制自动导引车以额定速度行驶,自动导引车正常运行。
注1:平面度定义为在基准范围内的最高高度与最低高度之差,如图2所示.
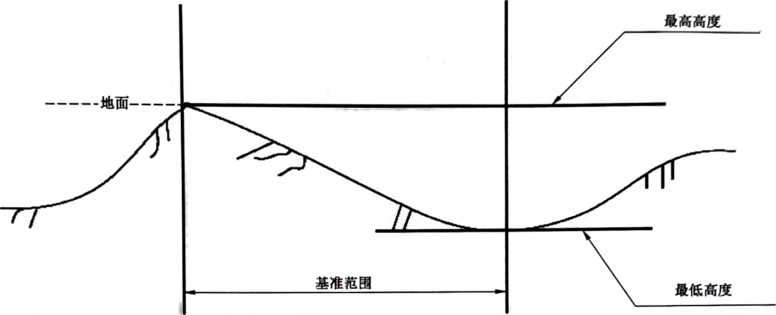
图2平面度
b)路面坡度
在坡度不小于O∙O5的路面上,控制自动导引车以额定速度行驶,自动导引车正常运行;控制自动导 引车在路面坡度不小于0.01停车点停止,自动导引车可靠停止。
注2:路面坡度(H/L)定义为在100 mm以上的长度范围内,路面水平高度差与路线长度的最大比值,如图3所示。
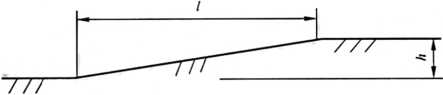
标引符号说明:
I ——路线长度,单位为毫米(mm);
h—路面水平高度差,单位为毫米(mm)。
图3路面坡度
C)台阶高度
在台阶高度不小于5 mm的路面上,控制自动导引车以额定速度行驶,自动导引车正常运行。
注3:台阶高度的定义为在100 mm以内的长度范围内,路面水平高度差的最大值,如图4所示。
~TΠ
/77
标引符号说明:
h——路面水平高度差的最大值,单位为毫米(mm).
d)沟槽宽度
在沟槽宽度不小于8 mm的路面上,控制自动导引车以额定速度行驶,自动导引车正常运行。
注4:沟槽宽度定义如图5所示。
777
标引符号说明:
W--沟槽宽度,单位为毫米(吧
沟槽宽度
:验箱内且供电正常工作,试验箱按照修改要求的试验
安照正常慮 正常运声 苣商的最大j
开关
且试:
S照■更使用安装状态固定在振动台且供电正常工作,仪器按變 I试验后,进行样品正常开关机测试,自动导引车吟妨 则应至少按照制造际搭潮芝值进行一次充电/放电循环,且试验后气俱為C多 击危险。
将试验样思 设定,试验过程
|曇求的试验条件 黄在试验后运行,
炸、电池放空或电
7.9安全性试验
7.9.1接地电阻
按照GB/T 5226.1—2019中18.2进行试验。
7.9.2绝缘电阻
按照GB/T 27544—2011中6.1进行试验。
7.9.3耐电强度
根据自动导引车的额定电压的不同,按照表4进行测试,在带电部件和车架之间加载如下交流电, 持续1 min O
表4耐压强度测试
单位为伏特
|
正常电压U |
__________交流测试电压__________ |
|
CΓ≤48 |
500 |
|
48<17≤96 |
1 000 |
|
CO96 |
1 500 |
8检验规则
8.1检验分类
产品检验分为型式检验和出厂检验。检验项目应符合表5的要求。
8.2型式检验
8.2.1有下列情况之一时,应进行型式检验:
a) 新产品投产或老产品转厂生产的试制定型鉴定;
b) 正式生产后,如结构、材料、工艺有较大改变,可能影响产品性能;
C)产品长期停产后,恢复生产;
d) 出厂检验结果与上次型式检验有较大差异;
e) 国家质量监管机构提出进行型式检验的要求;
f) 销售地区法律法规需要。
型式检验样品应在出厂检验合格的产品中随机抽取。
按表5的规定进行型式检验,若检验结果全部符合本文件要求,则判定为型式检验合格,若有任意 一项不符合本文件要求,则判定为型式检验不合格。
表5检验项目
|
序号 |
试验项目 |
技术要求 |
试验方法 |
型式检验 |
出厂检验 |
|
1 |
外观与结构 |
6.1 |
7.2 | ||
|
2 |
接口________ |
6.2 |
7.3 |
— | |
|
3 |
功能________ |
6.3 |
7.4 |
* | |
|
4 |
性能 |
6.4 |
7.5 |
— | |
|
5 |
电源适应性____ |
6.5 |
7.6 |
— | |
|
6 |
电磁兼容性____ |
6.6 |
7.7 |
— | |
|
7 |
环境适应性 |
6.7 |
7.8 |
— | |
|
8 |
安全性 |
6.8 |
7.9 | ||
|
注;“•”表示应检验的项目产一”表示不检验的项目;“ * "表示工厂实际情况的项目。 | |||||
8.2.2型式检验由厂家指定或委托的质量检验单位负责进行。
8.3出厂检验
8.3.1出厂检验宜对生产线上的产品进行的100%检验,检验后,除包装和加贴标签外,不再进一步加 工。检验过程中发现的不合格品,工厂应采取标识、隔离、处置等措施,避免不合格品的非预期使用或交 付。返工或返修产品重新检验合格后方可入库。
2。
GB/T 20721—2022
83.2出厂检验由厂家生产管理部负责进行。
9标志、包装、运输和贮存 9.1标志 9.1.1产品标志
产品上应有清晰的标志,其标志应包括以下内容:
a)
b) C)
d)
e)
f)
g)
产品型号;
产品名称;
公司名称或注册商标 产品出厂编号;
生产日期 产品执行
特征参
9.1.2包装标修
及注册
堆码"
识
的规定。
上应有
及型号
、充电
足
醒目位置标有“仅适用XX充电器”等类似警木说明;
示志和说明;
有
电
车
有
电池警示标识符合
产品的鄕包
a)
b) C) 包装
9.1.3 安
自动导渠车 安全警示眷识K
自动 自动导 充电器标 自动导引车
a)
b)
C)
d)
e)
负载、额定电压、额定速度、自重等)。
极端温度的高温/低温部件的警告和标志
自动导引车使用”等类似警示说明;
注:安全警示标识包括激光辐
9,2包装
包装箱内应有产品合格证、使用说明书、保修卡、装箱清单等。
9・3运输
在运输过程中,产品应存放在原包装箱内,电池组应处于半荷电状态,不准许和易燃、易爆、易腐蚀 的物品共同装运。应注意防雨、防尘及机械损伤。
在装卸过程中,禁止摔掷、滚翻和重压。
9∙4贮存
长期存储前应保证设备的电池组大于半荷电状态。存放仓库内应保证无酸、碱及腐蚀性气体、易燃 易爆物品。相对湿度不大于93%0最长存储时间与存储温度应满足表6的要求。
表6最长存储时间与存储温度对应关系
|
存储温度t |
最长存储时间__________ |
|
r<-40 ,C |
不准许存储___________ |
|
-40 ,C≤r<-20 ,C |
15 d |
|
-20 CWYO ,C |
__ |
|
0 ,C≤r<35 ,C |
6个月 |
|
35 ,C≤t<55 ,C |
1个月 |
|
55 ,C≤r<65 ,C |
48 h |
|
t≥65 ,C |
_________不准许存储___________ |
存储过程中应按表6要求的间隔时间对电池进行一次充电,保证电池/电池组荷电状态大于50%; 并确保电池电源开关处于关闭状态,禁止在存储时有任何形式的放电行为。
附录A
(规范性) 装载系统
AJ装载控制
控制装置应能够在制造商声明的规定时间内完成货物的装载指令。
当具有自动起升和下降功能时,可附加传感器,如上升/下降到位检测传感器。
液压系统升/降的控制应满足额定负载能力,在发生泄漏或者柔性油管脱落的情况下,其下降过程 不应因为速度过快而导致发生次生风险,液压系统应满足如下要求。
10 min内,因泄漏导致其负载下降的距离:
a) 额定负载不超过IoOOOkg时,下降小于100 mm;
b) 额定负载超过10 000 kg时,下降小于200 mmO
控制装置安全部件应至少满足GB/T 16855.1中PLC的要求。
A.2装载装置
装载装置应满足以下要求:
a) 根据装载装置应用的实际要求,可通过声光指示器提示装载装置准备移动或正在移动,且该指 示器可与自动导引车本体指示器组合;
b) 如不准许装载系统在全范围内运动,通过限制装载装置运动的方法加以保护,且限制装置可以 是机械锁止装置,也可以是电气部件或可编程部件;
C)装载装置发生故障后,在排除故障之前,装载系统保持停止状态;
d) 为便于装载装置进行检修和维护,装载系统可具有手动操作方式;
e) 液压装载装置采用的液压油品质高于12级(NAS 1638-2011规定的油液的固定颗粒污染等 级),且所用液压软管应能承受3倍额定工作压力1 min不破裂,无异常。
附录B
(规范性)
应用安全
应用安全应包括以下内容:
a) 自动导引车运行的区域需要明确标记;
b) 用户和系统制造商应将无法被障碍物检测装置保护的区域规定为危险区域,并由用户使用合 适的标志或地面标记标示出禁止人员进入;
C)障碍物和自动导引车(包括负载)之间距离小于0.5 m的区域应为人员限制区域,并用标志、条 纹、灯光或其他标记标明;
d) 在自动导引车进入人员限制区域之前,应降低速度,并启动声光警告;
e) 在非人员限制区域,应清楚标明自动导引车及其负载或拖车所需的区域,包括转向所需的
间隙;
D 在自动导引车经过的门口或交叉路口,应在门附近显著位置,安装合适的声光警报提示;
g)系统应设计合适的停止位置,足以保证自动导引车及其负载不会阻挡防火门完全关闭。
附录C
(规范性)
地面条件和危险区域
C.1地面条件
自动导引车制造商应给出以下地板规格要求:
a) 平坦度;
b) 强度;
C)表面光洁度(如摩擦系数和耐磨性);
d) 地面覆盖物;
e) 金属含量;
注:若涉及地面或地下铺设导航系统,则考虑导航系统的铺设。
f) 导电性;
g) 地板连接处的位置。
C.2危险区域
若间隙区域不足或人员检测保护装置不能使用时,应规定危险区和相应的标记,且避免与其他标记 和标志混淆。
参考文献
[1] NAS 1638—2011 CleanIineSS requirements Of PartS USed in hydraulic SyStemS
GB/T 20721-2022

玛上扫一扫正版服务到
版权专有侵权必究
*
书号:155066 ・ 1-70277
定价 46. 00元
