
ICS 03.220.20 ;43.040.80
T 35
备案号:
JT/T 1242—2019
PerfbrnIanCe requirements and test ProCedUreS for advanced emergenCy braking SyStem of commercial vehicle
2019-03-15 发布
2019-04-01 实施
中华人民共和国交通运输部发布
前言........................................................................................................................ɪn
本标准按照GB/T 1.1—2009给出的规则起草。
本标准由全国智能运输系统标准化技术委员会(SAC/TC 268)提出并归口。
本标准起草单位:交通运输部公路科学研究院、河南护航实业股份有限公司、重庆车辆检测研究院 有限公司、中关村中交国通智能交通产业联盟、中国汽车工程研究院股份有限公司、国家汽车质量监督 检验中心(襄阳)、郑州宇通客车股份有限公司、东风商用车有限公司、南京依维柯汽车有限公司、比亚 迪汽车工业有限公司、杭州好好开车科技有限公司、北京华为数字技术有限公司、北京福田戴姆勒汽车 有限公司、天津清智科技有限公司、杭州海康汽车技术有限公司、东莞市美保驭汽车智能科技有限公司、 厦门金龙旅行车有限公司、金龙联合汽车工业(苏州)有限公司、广州瑞立科密汽车电子股份有限公司。
本标准主要起草人:周炜、曲保章、李文亮、杨良义、王戡、黄轩、张长宇、李阳、李会仙、于雅丽、来R、 张禄、高永强、魏亚芳、郭文艺、罗禹贡、刘应吉、宋伟、曹琛、李臣、晋杰、穆宇丹、李茹、杨洪刚、王芳、张鹏 程、曾杰、王士军、李明超、胡佳妮、李学登、刘智超、汪祖国、韩春立、张东好、梁丰收。
IlI
1范围
本标准规定了营运车辆日动紧急制动系统的一般要求、功能要求、环境适应性要求和测试规程。
本标准适用于安装在营运车辆I:的自动紧急制动系统,其中测试规程适用于在封闭场地测试环境 对自动紧急制动系统进行规范性测试。
2规范性引用文件
下列文件对于本文件的应用是必不可少的。凡是注日期的引用文件,仅注LJ期的版本适用于本文 件。凡是不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
19951—2005道路车辆静电放电产生的电骚扰试验方法
21437.2— 2008
21437.3— 2012
GB/T
GB/T
GB/T
GB/T
GB/T
GB/T
28046. 1—2011
28046.2— 2011
28046.3— 2011
道路车辆 由传导和耦合引起的电骚扰 第2部分:沿电源线的电瞬态传导 道路车辆由传导和耦合引起的电骚扰第3部分:除电源线外的导线通 过容性和感性耦合的电瞬态发射 道路车辆 道路车辆 道路车辆
电气及电子设备的环境条件和试验 电气及电子设备的环境条件和试验 电气及电子设备的环境条件和试验
第1部分:一般规定 第2部分:电气负荷 第3部分:机械负荷
JT/T 794道路运输
车辆卩星定位系统车载终端技术要求
3术语和定义、缩略语
3.1术语和定义
下列术语和定义适用于本文件。
3.1.1
自动紧急制动系统 advanced emergeIlCy braking SyStem
自动探测目标车辆或障碍物,检测潜在的前向碰撞危险,发出预警信号提醒驾驶员,并激活本车制 动系统,通过降速来避免碰撞或减轻碰撞的系统。
3.1.2
自车 SUbjeCt VehiCIe
配有本标准所定义的自动紧急制动系统的车辆。
3.1.3
前车 forward VehiCle
位于自车行驶道路前方的车辆。
3.1.4
目标车辆 target VehiCle
在自车前方行驶轨迹线上,距离自车最近的前车,它是自动紧急制动系统工作时所针对的对象。
3.1.5
碰撞预警 COniSiOn Warning
AEBS向驾驶员发出碰撞危险提醒信息。
3.1.6
能见度 ViSibiIity
色温为2700 K的向炽灯发出的非扩散光束的照度减少到初始值5%吋所通过的路径长度。 [GB/T 33577—2017,定义 3. 14]
3.1.7
相邻车道 adjacent Iane
和自车所行驶的车道共用一条车道边界的行车车道,并且与自车行驶方向相同。
3.1.8
车 间距离 ClearanCe
从目标车辆车尾到自车车头的距离。
3.1.9
紧急制动阶段 emergeIlCy braking PhaSe
AEBS向自车发出制动指令要求,自车以至少4m∕s2的减速度开始减速的阶段。
3.1.10
碰撞预警阶段 COniSiOn Warning PhaSe
在紧急制动阶段前,AEBS向驾驶员发出前方可能发生碰撞的预警的阶段。
3.1.11
最小启动车速 minimum Start VeIOCity
AEBS启动预警和紧急制动功能的白车最小车速D
3.1.12
相对车速 relative VeIOCity
自车与目标车辆的纵向车速之差,计算方法见公式(1):
= OSV (Z) -。TV ( 0 式中:^r(O ---相对车速(nι∕s);
(1)
(2)
⅝v(0——自车车速(nι∕s);
f(Q——冃标车辆的车速(nι∕S)O
3.1.13
距离碰撞时间 time to COlliSiOn
在,时刻,自车与冃标障碍物发生碰撞所需的时间,计算方法见公式(2):
T
S和
式中:TVr——距离碰撞时间(S);
XC(O——车间距离(m)o
3.1.14
强化距离碰撞时间 enhanced time to COlliSiOn
当自车与目标车的加速度不相等,假定该加速度保持不变,且其车速、加速度及车间距离满足 (VTXf -VSV)2 - 2 X (QTV -QSV) X % > 0的条件时,计算方法见公式(3):
("τv - ^SV ) - ∖/ ( ©tv - ^SV ) ~ - 2 X ( GTv - ɑ`sv ) X *c ]
(3)
QTV _ QSV
式中:QTv
SV
冃标车辆的加速度(m∕s2);
自车的加速度(m∕s2)o
3∙2缩略语
下列缩略语适用于本文件。
AEBS:自动紧急制动系统(advanced emergenCy braking SyStenI)
ETrC:强化距离碰撞时间(enhanced time to COlIiSiOn)
TTC :距离碰撞吋间(time to ColIiSion)
4 —般要求
4.1 AEBS 构成
AEBS应包括环境感知模块、控制决策模块、底层执行模块、人机交互模块和数据通信接口,可包括 数据存储模块和无线通信模块,上述模块不限于独立或者集成的形式。
4.2 AEBS 分类
根据具备的功能,AEBS分为两类,见表1。每行代表一种不同的系统类型。表中碰撞预警应符合 5.3的要求,紧急制动应符合5.4的要求,车内通信应符合5. 5的要求,车路通信应符合5. 6的要求。
表1自动紧急制动系统分类及功能
|
系统类型 |
功 |
能____________________ | ||
|
碰撞预警 |
紧急制动 |
车内通信 |
车路通信 | |
|
I |
√ |
√ |
√ |
X |
|
U |
√ |
√ |
√ |
√ |
注:“V”表示需要该功能X”表示不需要该功能。
4.3 AEBS适配的车辆
AEBS应安装在配置防抱制动装置、电子稳定性控制系统及所有车轮安装盘式制动器的营运车 辆上。
4.4目标障碍物类型
AEBS能检测到的目标障碍物应包括在公共道路上行驶的机动车及行人。
4. 5自检及自诊断
AEBS应具备白检功能。系统应在车辆发动30s内启动并完成对所有主要的系统传感器和组件的 自检,通过信号灯或显示屏明确表示系统当前工作状态,包括车辆行驶状态采集、数据存储、通信模块工 作状态、主电源状态、与AEBS主机相连的其他设备状态等。
AEBS应具备自诊断功能,对于运行过程中发生的故障及时提示驾驶员并实时生成故障码信息。
4.6驾驶员控制和人机界面
AEBS应为驾驶员提供人机交互界面,与驾驶员进行信息交互。提供包括以听觉、视觉或触觉中至 少两种方式的预警信息、制动信息以及AEBS的运行、停止或故障状态信息。显示的信息应在阳光直射 下和夜晩均能清晰显示。
4.7驾驶员介入
当自车处于紧急制动阶段时,应能确保AEBS的工作状态不受驾驶员对制动踏板操作的影响。
4.8 AEBS功能恢复与解除
AEBS应在车辆点火时自动恢复至正常工作状态;AEBS功能解除后应采用光学预警信号向驾驶员 预警指示,提示驾驶员AEBS处于关闭/开启状态。
4.9紧急制动的制动约束
紧急制动不应引发比防抱制动装置或稳定性控制装置所允许的更长的抱死轮胎时间。
4.10制动信号灯控制
当AEBS实施自动制动时,制动信号灯应同时亮起并保持点亮至少0.5 SO
4.11数据备份
4.11.1对AEBS触发事件数据,应进行本地数据备份和远程数据备份。本地数据备份的最近存储时 间不应少于48h,远程存储吋间不应少于60d。
4.11.2 AEBS触发事件数据应至少包括下列信息:
a) 操作行为:AEBS产生的具体操作行为,包括的信息应不少于启动碰撞预警功能、启动紧急制 动功能、终止碰撞预警功能、终止紧急制动功能;
b) 操作状态:系统响应指定操作行为的状态,至少应包括状态正常、状态异常、未响应;
C)时冋戳:系统产生相应操作行为的时刻信息。
4.12安装与使用要求
AEBS系统应根据制造商所提供的使用说明书进行安装和使用,包括AEBS的校准、最小启动车速, 以及适用和不适用的工况等。
5功能要求
5.1运行车速
AEBS应至少在运行车速为15km∕h至最大设计速度的范围内,旦在车辆所有负载状态下正常 运行。
5.2目标检测区域
5.2.1 AEBS的最小检测距离应不大于2m,对目标车辆的最大检测距离应不小于150m,对行人的最 大检测距离应不小于60mo
5. 2.2 AEBS对冃标车辆在最大检测距离位置的最小检测水平横向宽度应不小于3. 75InQ
5.2.3 AEBS应能在曲率半径不大于25Om的弯道上检测到目标车辆。
5.3碰撞预警
5.3.1预警时间
TTC或ETTC大于4.4s,AEBS不应发出碰撞预警。
5.3.2预警方式
在AEBS检测到可能与前方车辆、行人发生碰撞时,应能输出不低于两种不同等级的预警。一级碰 撞预警应在紧急制动阶段l∙4s前产生,二级碰撞预警应在紧急制动阶段0.8s前产生。一级碰撞预警 至少应支持一种预警方式,二级碰撞预警至少应支持两种预警方式。行人预警应与车辆预警方式区分。 预警方式如表2所示。
表2预警方式
|
预警級別 |
____________________预警方式____________________ | ||
|
视觉预警 |
听觉预警 |
触觉预警 | |
|
一级碰撞预警 |
无 |
音量:应超过背景杂音; 间歇:建议长间隔式间歇, 单一声音,或语音提醒 |
可釆用驾驶员座椅振动、安 全带预收紧、方向盘振动、制 动踏板振动等方式 |
|
二级碰撞预警 |
颜色:红色; 位賞:主视方向; 亮度:高亮; 间歐:宜使用短间隔式间歇 |
音量:应超过背景杂音; 音调:应容易听到旦与车内 其他不相关的预警容易区分; 间歇:宜使用短间隔式间歇 |
可采用驾驶员座椅振动、安 全带预收紧、方向盘振动、制 动踏板振动等方式 |
5.3.3预警阶段的速度减小量
在预警阶段,任何自车减速量不应超过15kn√h与总减速量30%两者间的最大值。
5.4紧急制动
5.4.1紧急制动的启动
紧急制动阶段不应在TTC或ETTC大于或等于3s前开始。
5.4.2紧急制动中的最小速度降低量
5.4.2.1车车紧急制动中的最小速度降低量
对静止目标车辆,自车速度为80km∕h时,通过紧急制动阶段,发生碰撞时自车减速量应不小于
30 km/h o
对静止目标车辆,白车速度为40km∕h时,通过紧急制动阶段,应避免两车相撞。
对行驶速度为12km∕h的目标车辆,白车速度为80krn∕h时,通过紧急制动阶段,应避免两车相撞。
5.4.2.2车人紧急制动中的最小速度降低量
针对具有行人紧急制动功能的AEBS,自车速度为60km∕h时,通过紧急制动阶段,发生碰撞时自车 减速量应不小于20km∕ho
5.5车内通信
AEBS应能从车内通信网络提取所需的信息,车内通信网络提供的信息至少包括车速信息、制动、 油门和转向灯等信号。
5.6车路通信
5.6.1 Il型AEBS应具有无线移动通信技术的车路通信功能,实现与路侧单元执行数据的交互。
5.6.2 H型AEBS应能使用无线移动通信接口接收路侧单元发送的前方障碍物状态信息:障碍物类型 信息、地理位置信息和运动状态信息;接收前方道路状况信息:路面附着系数信息、横向坡度信息、纵向 坡度信息、弯道半径信息等;接收危险警示信息、交通状况信息、恶劣天气等信息。
5.6.3 Il型AEBS应能使用无线移动通信接口对外发送不少于以下类别的信息、白车的地理位置信 息、白车的行驶状态信息、白车检测到的行人或障碍物信息、白车检测到的车辆事故信息、白车检测到的 交通或道路异常状况信息。
5.6.4 Il型AEBS具有的无线移动通信接口应同时支持蜂窝接入通信方式和直连通信方式,两种通信 方式应采用相同的网络制式。
5. 6.5 Il型AEBS使用的无线通信技术应符合JT/T 794的规定。
5.6.6 Il型AEBS具有的直连通信方式的最大空口时延应不超过20rnso
5.6.7自车与路侧单元的可通信距离应不低于200Ino 6环境适应性要求
6.1电气环境适应性
6.1.1 工作电压范围
AEBS的工作电源应为车辆直流电源,工作电压范围应满足表3的要求。
表3工作电压范围 单位为伏特
|
标称直流电源电压 |
最低工作电压 |
最高工作电压 |
|
12 |
9 |
16 |
|
24 |
18 |
32 |
6.1.2过电压性能
AEBS的过电压性能应符合GB/T 28046. 2—20l 1中4. 3的要求。
6.1.3反向电压性能
AEBS的反向电压性能应符合GB/T 28046.2—2011中4.7.2.3的要求。
6.1.4气候环境适应性
AEBS应能适应的存储温度至少为-40CC〜85Y,工作温度至少为-30T -7OrO
6.2机械环境适应性
6.2.1振动
AEBS耐机械振动性能应符合GB/T 28046.3—2011中4. 1的要求。
6.2.2冲击
AEBS耐机械冲击性能根据AEBS的安装位置应符合GB/T 28046. 3—2011 φ4.2的要求。
6.3电磁环境适应性
6.3.1静电放电抗干扰度
采用GB/T 19951-2005所规定要求,按照表4的测试等级,应不低于IV级OAEBS试纶中及试纶 后不应出现电气故障,试验结果评定应符合GB/T 19951-2005中B类要求。
表4静电放电等级测试表
|
放电类型 |
严酷等级(kV) |
最少放电次数" | ||||
|
日选等级 |
试验等级 | |||||
|
I |
∏ |
In |
W | |||
|
接触放电 |
1> X |
±4 |
±6 |
±7 |
±8 |
3 |
|
空气放电 |
b X |
±4 |
±8 |
±14 |
±15 | |
|
”最小放电间隔时冋为5s。 "制造商和供应商协议值。 | ||||||
6.3.2沿电源线的电瞬态传导抗扰度
按照GB/T 21437.2—2008中第4章规定的方法对AEBS进行沿电源线的电瞬态传导抗扰度试验, 试验脉冲按照GB/T 21437.2—2008中表A. 1或表A. 2中Dl级要求选择试验脉冲1 ,2a,3a,3bo试验 中、试验后AEBS所有功能应符合GB/T 21437.2—2008中表A. 4或表A. 5的要求。
6.3.3耦合电瞬态发射抗扰度
采用容性耦合钳法和感性耦合钳法,按照GB/T 21437.3-2012中第3章的规定对AEBS进行耦合 电瞬态发射抗扰度试验,试验脉冲严酷程度应符合GB/T 21437.3-2012中表B. 1或表B. 2中ΠI级的 要求。试验中、试验后AEBS所有功能应处于GB/T 28046.1—2011定义的A级。
7测试规程
7.1试验目标
用于试验的目标应为MI类乘用车和行人模型;作为替代,也可采用表征参数能够代表上述车 辆且适应AEBS传感器的柔性目标车辆。行人模型为行业普遍采用的静态成年假人模型,行人模型身 高1 800mm,肩宽5OOmm,躯干倾角85。。
7.2环境条件
试验应在水平、干燥、具有良好附着能力的混凝土或沥青路面上进行,水平能见度应大于Ikm。
测试环境温度范围应为-20Y〜45Y ,环境风速应小于5π√so
7.3车辆条件
整个试验过程中,自车应保持满载状态。
7.4自动紧急制动系统测试
7.4.1冃标检测距离测试
7.4.1.1测试过程
目标车辆静止,和自车的方向一致,在达到测试开始前,自车和目标车辆中心线保持一致。当自车 距离冃标车辆20Om时,测试开始。自车与Fl标车辆发生碰撞或距离冃标车辆小于2m且无法探测到冃 标车辆,试验结束。测试过程如图1所示。
检测距离 测试
Okm/h
20Om
目标车辆
图1检测距离测试方法示意图
7.4.1.2试验有效性要求
测试开始后,自车与目标车辆的中心线的偏差不超过自车宽度的±20% o
7.4.1.3试验通过性要求
试验通过标准遵循以下规则:
a) 测试开始后,在识别到冃标车辆后AEBS应给出目标车辆识别信息;
b) 系统的检测距离应满足5.2.1的要求;
C)进行1次测试。
7.4.2目标检测宽度测试
7.4.2.1测试过程
日标车辆静止,和自车的方向一致,在达到测试开始前,日车位于车道中心线,分别将目标车辆置于 车道最左侧和最右侧,车头方向应与自车一致,各进行一次测试。左侧检测宽度测试时,目标车左侧车 轮压自车左侧车道线;右侧检测宽度测试时,冃标车右侧车轮压自车右侧车道线。当自车距离冃标车辆 20Om时,测试开始。白车与冃标车辆距离小于150m,试验结束。冃标车辆置于车道最左侧和最右侧的 测试过程分别如图2和图3所示。
目标车辆
检测宽度 测试
|
自矩 |
2 |
20Om
I OkiTɪ/h
图2目标车位于左侧检测宽度测试方法示意图
检测宽度 测试
20Om
0km∕h
F标车辆
图3目标车位于右侧检测宽度测试方法示意图
7.4.2.2试验有效性要求
测试开始后,白车与车道中心线的偏差不超过自车宽度的±20% O
7.4.2.3 试验通过性要求
试對通过标准遵循以下规则:
a) 测试开始后,在识别到目标车辆后AEBS应给出目标车辆识别信息;
b) AEBS识别到目标车辆时自车与目标车辆距离应满足5.2.1的要求;
C)分别将目标车辆置于车道最左侧和最右侧,各进行1次测试。
7.4.3日标车辆静止测试
7.4.3.1测试过程
目标车辆静止,和自车的方向一致。当自车以80kπ√h和40km∕h速度行驶,距离目标车辆15Om 时,测试开始,驾驶员保持加速踏板位置,保持车速。自车与口标车辆发生碰撞或避免碰撞,试验结束。 测试过程如图4所示。
80km∕h 和 40km∕h
目标车静止自华,一
15Om
自车车速减少量 不少于30km∕h
目标车辆
图4目标车辆静止测试方法
7.4.3.2试验有效性要求
试验有效性要求遵循以下规则:
a) 测试开始后,自车速度应保持在±2km∕h的误差范围内;
b) 测试开始后,自车与目标车辆的中心线的偏差不超过自车宽度的± 20% o
7.4.3.3 试纶通过性要求
试验通过标准遵循以下规则:
a) 预警方式应满足5.3.2的要求;
b) 预警阶段的速度减小量应满足5.3.3的要求;
C)紧急制动的启动应满足5.4. 1的要求;
d) 紧急制动中的最小速度降低量应满足5.4.2的要求;
e) 进行1次测试。
7.4.4冃标车辆移动测试
7.4.4.1测试过程
目标车辆和自车的方向一致。测试过程中,自车保持在80krn∕h的速度沿车道中心线直线行驶,目 标车辆保持在12kn√h的速度沿车道中心线直线行驶。自车和目标车辆距离等于15Om时,测试开始, 驾驶员保持加速踏板位置,保持车速。测试过程如图5所示。
80km∕h I2km∕h
目标车移动I自阵-------------------1 1 》碰撞避免
———————-B 标福
图5目标车辆移动测试方法
7.4.4.2试验有效性要求
试验有效性要求遵循以下规则:
a) 自车与冃标车辆的车速均应保持在±2 km/h误差范围内;
b) 自车与目标车辆的中心线的偏差不超过自车宽度的±20% O
7.4.4.3 试验通过性要求
试验通过标准遵循以下规则:
a)预警方式应满足5.3.2的要求;
b(预警阶段的速度减小大应数据5.3.3的要求:
c(紧急制动的启动应数据5.4.1的要求:
d(紧急制动中的最小速度降异大应数据5.4.2的要求:
e(进行1弯测试。
7.4.5事道面向目标识况测试
7.4.5.1测试过程
足测试在直常后径为25Om或口 15Om的事道上进行。直常后径为25Om时,自车、相邻车道前车和 目标车辆型以不异于50krrι∕h的速度同向行驶。直常后径为15Orn时,自车、相邻车道前车和Fl标车辆 型以不异于40km∕h的速度同向行驶。测试过程使图6所无。
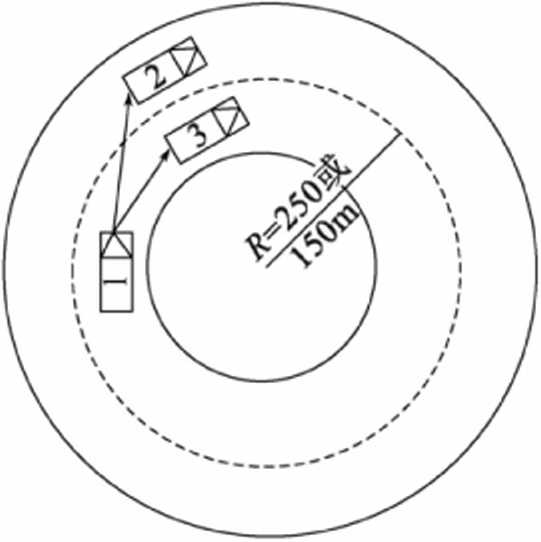
采两一
1) ))自车:
2) ))相邻车道前车:
3) ))目标车辆。
图6测试弯道和目标识别性能测试
自车和廿标车辆在同一车道储行驶,相邻车道前车在廿标车辆外横车道行驶,且车等距离不会表发 预警。
测试开始状,相邻车道前车减速至25km/h以下,在白车围过临车道前车的过程中AEBS不应预警 且不接行制动。然状目标车辆减速至自车能发岀碰撞预警的速度。持自车开始预警时测试半束。 7.4.5.2试验有效性要求
试验有效性要求遵循以下规则一
a(测试开始前,3台试骑车辆速度误差应人交在±3km∕h范连储,至少2s:
b(测试开始状到试验半束前,自车速度应具定在±3km∕h误差范连储。
7.4.5.3 试验通过性要求
试验通过标准遵循以下规则一
a(在自车围过邻车道前车的过程中AEBS不应预警,且不接行制动:
b(自车应在与目标车辆发生碰撞前发出预警:
c(进行1弯测试。
7.4.6误置应测试
7.4.6.1测试过程
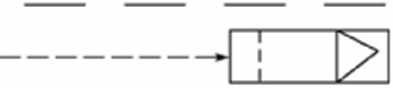
自车应以50krn∕h匀速行驶至少60 m状穿过存辆静种的前车,驾驶员人交满速符示位根,人交车 速。存辆静种前车的车头方向应与自车一致,车身等距为4.5m,车辆尾部在同一故类。误置应测试过 程使图7所无。
50km∕h
0km∕h
—∣4.5m不动作
前车j Okm/h
能7预警制车动碰撞能
7.4.6.2试纶有效性要求
试验有效性要求遵循以下规则:
a)
b)
C)
7.4.6.3
自车的速度稳定在±2km/h误差范围内;
两辆静止前车的横向距离的误差应在±0∙ Im范围内;
两辆静止前车的纵向距离的误差应在±0. Im范围内。
试验通过性要求
试验通过标准遵循以下规则:
a) 自车不应发出碰撞预警,不应进行紧急制动;
b) 进行1次测试。
7.4.7行人测试
7.4.7.1测试过程
测试开始时,测试车辆沿规划的车道中心线加速到60 km/h,并保持一段距离,驾驶员保持加速 踏板位置,保持车速,从月为自车的车道中心线。同时控制行人从测试车辆左侧距离测试车道中心线 6m远处沿/1-4路径运动,其中,行人的加速距离(/)为1.5mo L点为自车与行人的碰撞点,行人在距离 L点4.5m时,应达到8kn√h的目标速度。若自车AEBS自动制动或发生碰撞,则测试結束。测试过程 如图8所示。

能8急紧车动碰撞能
7.4.7.2试验有效性要求
试验有效性要求遵循以下规则:
a) 自车速度应保持在±2km∕h的误差范围内;
b) 行人运动速度应保持在± lkm∕h的误差范围内;
C)自车的中心线的偏差不应超过自车宽度的±20% O
7.4.7.3 试验通过性要求
试验通过标准遵循以下规则:
a) 预警方式应满足5.3.2的要求;
b) 预警阶段的速度减小量应满足5. 3. 3的要求;
C)紧急制动的启动应满足5.4. 1的要求;
CI)紧急制动中的最小速度降低量应满足5.4.2的要求;
e)进行1次测试。
7.4.8车路通信测试
7.4.8.1测试过程
测试道路识边设有路侧单元,路侧单元以每给将10次左右发送障碍物状态信息,障碍物状态信息 各相关运营方授权后巾路侧单元模拟,模拟的障碍物状态信息不应少于障碍物类型信息、地理位置信息 和运动状态信息(模拟的运动状态为静止状态)。当自车的速度在72krn∕h,距离模拟的地理位置至少 为150m时,测试开始,驾驶员保持加速踏板位置,保持车速。测试过程如心9所示。

72km∕h
模拟障碍物
图9车路通信测试方法示意图
7.4.8.2试验有图性要求
试验有图性要求偏遵以下规循:
a) 测试开始后,白车速度应保持在±2km∕h的则差范围内;
b) 测试开始后,白车的中达线的效差不超过自车宽度的±20%。
7.4.8.3试捡通过性要求
试验通过标准偏遵以下规循:
a) 自车应在TTC或ETTC大于2.7s ~ 4.4s时发出预警;
b) 进行1次测试。
7.5远程数据备份
7.5.1测试场地周围保证测试道路存在无线网络覆盖。测试所需的远端服务器与自车的AEBS建立 连接。在执行7.4.3 ~7.4.8涉及的测试项时,自车应向远端服务器实时发送备份数据。
7.5.2试验有图性应符合7.4.3-7.4.8相应要求。
7.5.3在所有有图测试中,远端服务器备份数据中的信息与现场监测到的AEBS相关信息应完全 一致。
参考文献
[1] GB 7258验紧辆车下范持沿线生不
[2] GB/T 15089捡紧辆自静挂辆道加
[3] GB/T 19056汽辆下撞记录仪
[4] GB/T 33577智性车方制的 辆自通过发位向碰制的 试性求应程于在标中
[5] JT/T 883规车辆自下撞冃或向碰制的 沿线求应程在最所有
[6] JT/T 1094规车客辆范持沿线生不
[7] ECE RegUIation: 131 保行验紧辆自 AEBS 一的要标准[Uniformprovisioiisconcerniiigmotorvehicles AdVanCed EnIergenCy BrakirIg SyStemS ( AEBS)]
[8] SAE J2399 :2014 动和测巡航当急(ACC)-预警满试程进户驾等[AdaPtiVe CrUiSe ControI (ACC) OPerating CharaCteriStiCS and USer interface ]
13